================ by Jawad Haider
- Basic RNN - Recurrent Neural Networks
- Advantages of an LSTM
- Perform standard imports
- Create a sine wave dataset
- Create train and test sets
- Prepare the training data
- Define an LSTM model
- Instantiate the model, define loss & optimization functions
- Predicting future values
- Train and simultaneously evaluate the model
- Forecasting into an unknown future
- Train the model
- Predict future values, plot the result
- Great job!
Basic RNN - Recurrent Neural Networks¶
Up to now we’ve used neural networks to classify static images. What happens when the thing we’re trying to explain changes over time? What if a predicted value depends on a series of past behaviors?
We can train networks to tell us that an image contains a car.
How do we answer the question “Is the car moving? Where will it be a minute from now?”
This challenge of incorporating a series of measurements over time into the model parameters is addressed by Recurrent Neural Networks (RNNs).
Be sure to watch the theory lectures. You should be comfortable with: * conditional memory * deep sequence modeling * vanishing gradients * gated cells * long short-term memory (LSTM) cells
PyTorch offers a number of RNN layers and options.
*
torch.nn.RNN()
provides a basic model which applies a multilayer RNN with either
tanh or ReLU non-linearity functions to an input
sequence.
As we learned in the theory lectures, however, this has
its limits.
*
torch.nn.LSTM()
adds a multi-layer long short-term memory (LSTM) process which greatly
extends the memory of the RNN.
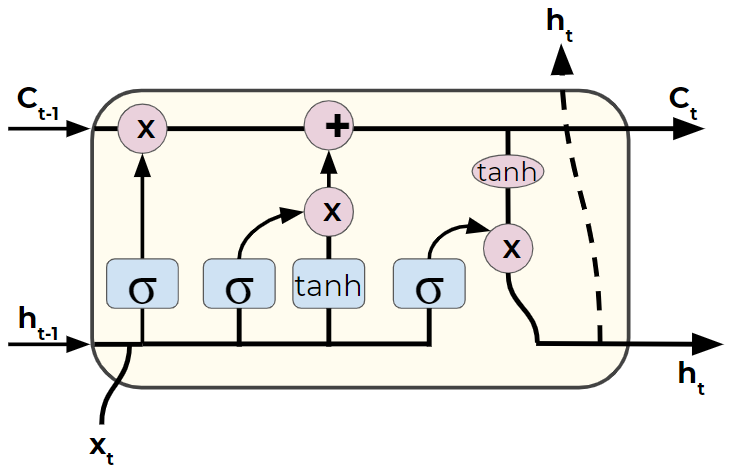
Advantages of an LSTM¶
For each element in the input sequence, an LSTM layer computes the
following functions:
\(\begin{array}{ll} \\ i_t = \sigma(W_{ii} x_t + b_{ii} + W_{hi} h_{(t-1)} + b_{hi}) \\ f_t = \sigma(W_{if} x_t + b_{if} + W_{hf} h_{(t-1)} + b_{hf}) \\ g_t = \tanh(W_{ig} x_t + b_{ig} + W_{hg} h_{(t-1)} + b_{hg}) \\ o_t = \sigma(W_{io} x_t + b_{io} + W_{ho} h_{(t-1)} + b_{ho}) \\ c_t = f_t * c_{(t-1)} + i_t * g_t \\ h_t = o_t * \tanh(c_t) \\ \end{array}\)
where \(h_t\) is the hidden state at time \(t\),
\(c_t\) is the cell
state at time \(t\),
\(x_t\) is the input at time \(t\),
\(h_{(t-1)}\)
is the hidden state of the layer at time \(t-1\) or the initial hidden
state at time \(0\), and
\(i_t, f_t, g_t, o_t\) are the input, forget,
cell, and output gates, respectively.
\(\sigma\) is the sigmoid
function, and \(*\) is the Hadamard product.
To demonstrate the potential of LSTMs, we’ll look at a simple sine wave. Our goal is, given a value, predict the next value in the sequence. Due to the cyclical nature of sine waves, an typical neural network won’t know if it should predict upward or downward, while an LSTM is capable of learning patterns of values.
Perform standard imports¶
import torch
import torch.nn as nn
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
%matplotlib inline
Create a sine wave dataset¶
For this exercise we’ll look at a simple sine wave. We’ll take 800 data points and assign 40 points per full cycle, for a total of 20 complete cycles. We’ll train our model on all but the last cycle, and use that to evaluate our test predictions.
# Create & plot data points
x = torch.linspace(0,799,steps=800)
y = torch.sin(x*2*3.1416/40)
plt.figure(figsize=(12,4))
plt.xlim(-10,801)
plt.grid(True)
plt.plot(y.numpy());

Create train and test sets¶
We want to take the first 760 samples in our series as a training sequence, and the last 40 for testing.
Prepare the training data¶
When working with LSTM models, we start by dividing the training sequence into a series of overlapping “windows”. Each window consists of a connected string of samples. The label used for comparison is equal to the next value in the sequence. In this way our network learns what value should follow a given pattern of preceding values. Note: although the LSTM layer produces a prediction for each sample in the window, we only care about the last one.
For example, say we have a series of 15 records, and a window size of 5. We feed \([x_1,..,x_5]\) into the model, and compare the prediction to \(x_6\). Then we backprop, update parameters, and feed \([x_2,..,x_6]\) into the model. We compare the new output to \(x_7\) and so forth up to \([x_{10},..,x_{14}]\).
To simplify matters, we’ll define a function called input_data that builds a list of (seq, label) tuples. Windows overlap, so the first tuple might contain \(([x_1,..,x_5],[x_6])\), the second would have \(([x_2,..,x_6],[x_7])\), etc.
Here \(k\) is the width of the window. Due to the overlap, we’ll have a total number of (seq, label) tuples equal to \(\textrm{len}(series)-k\)
def input_data(seq,ws): # ws is the window size
out = []
L = len(seq)
for i in range(L-ws):
window = seq[i:i+ws]
label = seq[i+ws:i+ws+1]
out.append((window,label))
return out
To train on our sine wave data we’ll use a window size of 40 (one entire cycle).
# From above:
# test_size = 40
# train_set = y[:-test_size]
# test_set = y[-test_size:]
window_size = 40
# Create the training dataset of sequence/label tuples:
train_data = input_data(train_set,window_size)
len(train_data) # this should equal 760-40
720
(tensor([ 0.0000e+00, 1.5643e-01, 3.0902e-01, 4.5399e-01, 5.8779e-01,
7.0711e-01, 8.0902e-01, 8.9101e-01, 9.5106e-01, 9.8769e-01,
1.0000e+00, 9.8769e-01, 9.5106e-01, 8.9100e-01, 8.0901e-01,
7.0710e-01, 5.8778e-01, 4.5398e-01, 3.0901e-01, 1.5643e-01,
-7.2400e-06, -1.5644e-01, -3.0902e-01, -4.5400e-01, -5.8779e-01,
-7.0711e-01, -8.0902e-01, -8.9101e-01, -9.5106e-01, -9.8769e-01,
-1.0000e+00, -9.8769e-01, -9.5105e-01, -8.9100e-01, -8.0901e-01,
-7.0710e-01, -5.8777e-01, -4.5398e-01, -3.0900e-01, -1.5642e-01]),
tensor([1.4480e-05]))
(tensor([ 0.0000, 0.1564, 0.3090, 0.4540, 0.5878,
0.7071, 0.8090, 0.8910, 0.9511, 0.9877,
1.0000, 0.9877, 0.9511, 0.8910, 0.8090,
0.7071, 0.5878, 0.4540, 0.3090, 0.1564,
-0.0000, -0.1564, -0.3090, -0.4540, -0.5878,
-0.7071, -0.8090, -0.8910, -0.9511, -0.9877,
-1.0000, -0.9877, -0.9511, -0.8910, -0.8090,
-0.7071, -0.5878, -0.4540, -0.3090, -0.1564]),
tensor([ 0.0000]))
Define an LSTM model¶
Our model will have one LSTM layer with an input size of 1 and a hidden
size of 50, followed by a fully-connected layer to reduce the output to
the prediction size of 1.
During training we pass three tensors through the LSTM layer - the
sequence, the hidden state \(h_0\) and the cell state \(c_0\).
This means we need to initialize \(h_0\) and \(c_0\). This can be done with random values, but we’ll use zeros instead.
class LSTM(nn.Module):
def __init__(self, input_size=1, hidden_size=50, out_size=1):
super().__init__()
self.hidden_size = hidden_size
# Add an LSTM layer:
self.lstm = nn.LSTM(input_size,hidden_size)
# Add a fully-connected layer:
self.linear = nn.Linear(hidden_size,out_size)
# Initialize h0 and c0:
self.hidden = (torch.zeros(1,1,hidden_size),
torch.zeros(1,1,hidden_size))
def forward(self,seq):
lstm_out, self.hidden = self.lstm(
seq.view(len(seq), 1, -1), self.hidden)
pred = self.linear(lstm_out.view(len(seq),-1))
return pred[-1] # we only care about the last prediction
Instantiate the model, define loss & optimization functions¶
Since we’re comparing single values, we’ll use
torch.nn.MSELoss
Also,
we’ve found that
torch.optim.SGD
converges faster for this application than
torch.optim.Adam
torch.manual_seed(42)
model = LSTM()
criterion = nn.MSELoss()
optimizer = torch.optim.SGD(model.parameters(), lr=0.01)
model
LSTM(
(lstm): LSTM(1, 50)
(linear): Linear(in_features=50, out_features=1, bias=True)
)
def count_parameters(model):
params = [p.numel() for p in model.parameters() if p.requires_grad]
for item in params:
print(f'{item:>6}')
print(f'______\n{sum(params):>6}')
count_parameters(model)
200
10000
200
200
50
1
______
10651
Predicting future values¶
To show how an LSTM model improves after each epoch, we’ll run predictions and plot the results. Our goal is to predict the last sequence of 40 values, and compare them to the known data in our test set. However, we have to be careful not to use test data in the predictions - that is, each new prediction derives from previously predicted values.
The trick is to take the last known window, predict the next value, then
append the predicted value to the sequence and run a new
prediction on a window that includes the value we’ve just predicted.
It’s like adding track in front of the train as it’s
moving.
Image source:
https://giphy.com/gifs/aardman-cartoon-train-3oz8xtBx06mcZWoNJm
In this way, a well-trained model should follow any regular trends/cycles in the data.
Train and simultaneously evaluate the model¶
We’ll train 10 epochs. For clarity, we’ll “zoom in” on the test set, and only display from point 700 to the end.
epochs = 10
future = 40
for i in range(epochs):
# tuple-unpack the train_data set
for seq, y_train in train_data:
# reset the parameters and hidden states
optimizer.zero_grad()
model.hidden = (torch.zeros(1,1,model.hidden_size),
torch.zeros(1,1,model.hidden_size))
y_pred = model(seq)
loss = criterion(y_pred, y_train)
loss.backward()
optimizer.step()
# print training result
print(f'Epoch: {i+1:2} Loss: {loss.item():10.8f}')
# MAKE PREDICTIONS
# start with a list of the last 10 training records
preds = train_set[-window_size:].tolist()
for f in range(future):
seq = torch.FloatTensor(preds[-window_size:])
with torch.no_grad():
model.hidden = (torch.zeros(1,1,model.hidden_size),
torch.zeros(1,1,model.hidden_size))
preds.append(model(seq).item())
loss = criterion(torch.tensor(preds[-window_size:]),y[760:])
print(f'Loss on test predictions: {loss}')
# Plot from point 700 to the end
plt.figure(figsize=(12,4))
plt.xlim(700,801)
plt.grid(True)
plt.plot(y.numpy())
plt.plot(range(760,800),preds[window_size:])
plt.show()
Epoch: 1 Loss: 0.09212875
Loss on test predictions: 0.6071590185165405

Epoch: 2 Loss: 0.06506767
Loss on test predictions: 0.565098762512207

Epoch: 3 Loss: 0.04198047
Loss on test predictions: 0.5199716687202454

Epoch: 4 Loss: 0.01784276
Loss on test predictions: 0.42209967970848083

Epoch: 5 Loss: 0.00288710
Loss on test predictions: 0.16624116897583008

Epoch: 6 Loss: 0.00032008
Loss on test predictions: 0.03055439703166485

Epoch: 7 Loss: 0.00012969
Loss on test predictions: 0.014990181662142277

Epoch: 8 Loss: 0.00012007
Loss on test predictions: 0.011856676079332829

Epoch: 9 Loss: 0.00012656
Loss on test predictions: 0.010163827799260616

Epoch: 10 Loss: 0.00013195
Loss on test predictions: 0.00889757089316845

Forecasting into an unknown future¶
We’ll continue to train our model, this time using the entire dataset. Then we’ll predict what the next 40 points should be.
Train the model¶
Expect this to take a few minutes.
epochs = 10
window_size = 40
future = 40
# Create the full set of sequence/label tuples:
all_data = input_data(y,window_size)
len(all_data) # this should equal 800-40
760
import time
start_time = time.time()
for i in range(epochs):
# tuple-unpack the entire set of data
for seq, y_train in all_data:
# reset the parameters and hidden states
optimizer.zero_grad()
model.hidden = (torch.zeros(1,1,model.hidden_size),
torch.zeros(1,1,model.hidden_size))
y_pred = model(seq)
loss = criterion(y_pred, y_train)
loss.backward()
optimizer.step()
# print training result
print(f'Epoch: {i+1:2} Loss: {loss.item():10.8f}')
print(f'\nDuration: {time.time() - start_time:.0f} seconds')
Epoch: 1 Loss: 0.00013453
Epoch: 2 Loss: 0.00013443
Epoch: 3 Loss: 0.00013232
Epoch: 4 Loss: 0.00012879
Epoch: 5 Loss: 0.00012434
Epoch: 6 Loss: 0.00011931
Epoch: 7 Loss: 0.00011398
Epoch: 8 Loss: 0.00010854
Epoch: 9 Loss: 0.00010313
Epoch: 10 Loss: 0.00009784
Duration: 173 seconds
Predict future values, plot the result¶
preds = y[-window_size:].tolist()
for i in range(future):
seq = torch.FloatTensor(preds[-window_size:])
with torch.no_grad():
# Reset the hidden parameters
model.hidden = (torch.zeros(1,1,model.hidden_size),
torch.zeros(1,1,model.hidden_size))
preds.append(model(seq).item())
plt.figure(figsize=(12,4))
plt.xlim(-10,841)
plt.grid(True)
plt.plot(y.numpy())
plt.plot(range(800,800+future),preds[window_size:])
plt.show()

Great job!¶
![]()